 Medical Robotics
Medical Robotics
The quest for early detection and treatment of cancer in minimally invasive surgery has pushed research forward in the development of miniaturized instruments. Flexible endoscopes provide the unique ability to navigate through body cavities and reach a surgical target area. However, the flexibility required for safe navigation conflicts with forces and dexterity that can be provided distally, and causes loss of sensor feedback, making instrument control poor and limiting current therapeutic capabilities. We are researching how to design and build smarter, smaller, softer, safer robotic platforms that can restore dexterity and sensor feedback at the surgical site and enable therapy in the narrowest regions of the human body.
Soft Robotics
Robots are becoming part of our daily lives and we are focusing on how to make human-robot interaction safer and more intuitive. Soft robots have great potential in this field because they are constructed from compliant and flexible matter. These machines rely on the properties of materials in order to build sensor, actuator, and controller components, thus representing a paradigm shift with respect to their hard robots counterparts. We are exploring how soft robots can move more precisely and generate larger forces by investigating different design strategies, sensing techniques, and actuation methodologies.
Advanced Manufacturing
The small scale of minimally invasive surgery poses significant engineering challenges to developing robust, smart, and articulated tools for safely manipulating delicate anatomical structures.
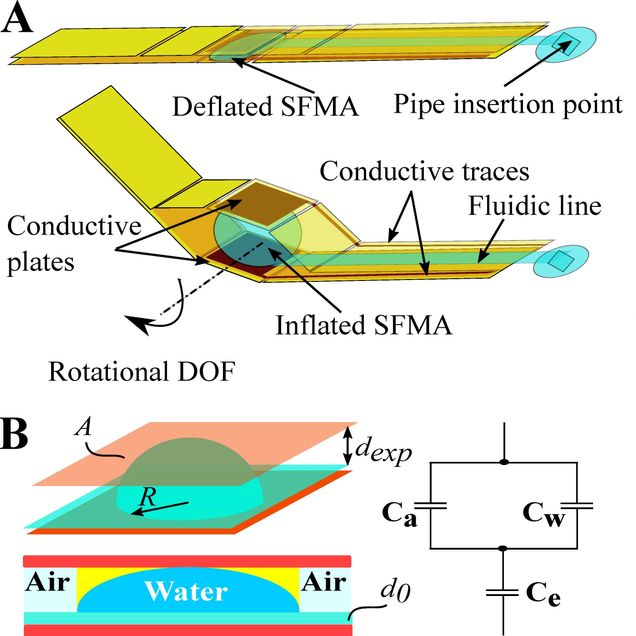
We are investigating novel manufacturing technologies that combine soft materials and soft fluidic micro actuators (SFMA) with miniaturized precision mechanisms to achieve safe distal articulation, integrated sensing, and effective force transmission.