Research projects
My research interests lie at the intersection of automatic control, robotics and computer vision. I am particularly interested in applications of Riemannian geometry and in distributed problems involving teams of multiple agents.
Consensus algorithms on Riemannian manifolds
Given a group of agents which move in Euclidean space and communicate according to a given communication graph, standard consensus algorithms provide a protocol which, as time passes, brings all the agents to a common location. The key aspect here is that only local communications are used. These algorithms, however, do not apply when the agents evolve on a manifold (for instance, imagine a group of satellites synchronizing their poses). Using my theoretical work, I proposed a natural extension for this case, and characterized its convergence for a large class of manifolds.
This work was awarded Best Student Paper and Best Student Paper Runner-up at the IEEE Conference for Decision and Control (CDC) in 2012 and 2011, respectively.
Distributed optimization on Riemannian manifolds
I worked on distributed optimization problems involving variables lying on non-linear spaces (that is, Riemannian manifolds) using extensions of gradient descent algorithms with fixed step size. I developed novel theoretical tools which significantly broadened the state of the art for determining sufficient conditions for global behaviors (algorithm convergence) using only local information. These tools have been used in consensus algorithms, camera localization and formation control.
Motion segmentation
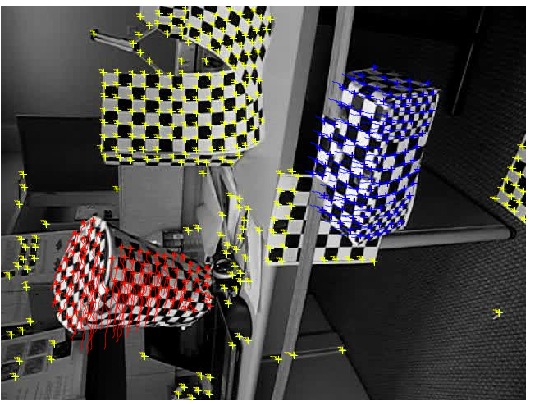
My initial research included the comparison of different algorithms for segmenting multiple moving objects in a monocular video. For this purpose,
I created the Hopkins 155 dataset, which, since its introduction, has been used in over 150 scholarly articles and is a de-facto standard benchmark in this field.
The following is a frame from the dataset, together with the manually labelled feature tracks.
Please refer to the dataset page on the JHU Vision Lab for more detailed information and download instructions.