Control of Micro Aerial Vehicles under Aerodynamic and Physical Contact Interactions
Overview
The goal of this project is to make quadrotors and other similar small-scale flying rotorcraft safer and easier to fly. Both recreational and commercial use of these vehicles has recently surged in popularity. However, safety concerns about potentially damaging collisions limit their deployment near people or in close formation, and the current state of the art in vehicle control is insufficient for potential applications involving flight inside of complicated structures such as industrial plants, forests and caves. This project will lead to innovations in control schemes, aerodynamic interactions modeling, and robust aerial vehicles design. Together, these innovations will make small-scale vehicles less likely to cause unintended damage, suitable for use in extreme environments such as caves, and more easily piloted. This will allow in turn the use of these vehicles in new industrial monitoring and search-and-rescue applications, thus bringing the benefits of these platforms to larger segments of society.
Contraction theory and Riemannian tangent bundles
We started by considering attitude-only controllers; in this case, the state space can be modeled as the tangent bundle of the Special Orthogonal Lie group (i.e., as the space of rotations together with their angular velocities). Building upon previous work, the metric and the differentiation operator that are used in standard contraction theory for Euclidean spaces correspond, respectively to the Riemannian metric and covariant differentiation on Riemannian manifolds, and the differentiation operation corresponds to covariant differentiation. However, existing results for covariant differentiation on tangent bundles (which is what is required for our application) can be applied only to a specific type of metric (the Sasaki metric, which is only a particular case of natural metrics). The first step under this grant, therefore, has been to generalize existing results to a more general class of non-natural metrics. While previous natural metrics, intuitively, do not allow “interaction” between changes in rotations and changes in velocity, our new class of metrics instead explicitly allows such “interactions”.
Improved geometric control
Building upon the results above, we have applied the generalized metric for the bundle to the actual problem of geometric attitude control for quadrotors. The key in this application is that the contraction metric is a linear matrix inequality with a special structure stemming from the configuration manifold, allowing for an efficient search of metric coefficients and tuning of the controller coefficients that prove exponential stability of the controller. The work on our Riemannian contraction control framework resulted in a geometric attitude controller that is locally exponentially stable and almost globally asymptotically stable; the exponential convergence region is much larger than existing non-hybrid geometric controllers (and covers almost the entire rotation space). As an additional contribution, we proposed a general framework to automatically select controller gains by optimizing bounds on the system’s convergence rate; while this principle is quite general, its application is particularly straightforward in the case of our contraction-based controller.
Using designed reference trajectories for improved convergence
We extended the almost-globally exponentially stable controller described above to include a reference trajectory that exponentially converges to the ultimate desired equilibrium. This extension our approach truly globally exponentially convergent for the rotation component, although discontinuous in terms of the initial conditions. From a technical standpoint, this requires extendeding our approach from using a bundle metric (on the tangent bundle TSO(3)) to product manifolds (TSO(3) times SO(3)); this required finding new ways to bound the cross-terms that arise in the contraction condition. We also changed the automatic parameter tuning procedure from a grid search to a derivative-free optimization search, due to the increase in the number of parameters in the contraction condition. Of note is that the convergence rate of the reference trajectory (which is a design parameter) is optimized along those of the Riemannian metric.
Aerodynamic simulation of small-scale quadrotors
We begun simulations of small quadrotors in order to fully develop the computational capability to characterize the aerodynamics associated with these systems. The student has been trained to use the Helios softward suite of codes originally developed for analyzing helicopter aerodynamics. The effect of near-body CFD base method and turbulence model choice as well as transition model on the simulation results have been study in order to determine a best computational method. The Spalart Allmaras model with no transition method was shown to work well to predict thrust. This method was then used to analyze flow effects found in multirotor systems including rotor-fuselage interactions and fountain flow (which leads to flow reingestion). A computational study of the influence of these phenomena based on rotor placement has been started. The development of the computational capability will enable further investigation and understanding, together with the experiments, of the behavior of important aerodynamic parameters that are used in the control algorithms such as the coefficient of thrust and the blade-flap angle. Most recently, the PhD student has worked with the developers of the Helios suite to include a method for modeling RPM-based trim. This capability will allow us to now move from characterization of hover performance to maneuvering performance. Initial results of our aerodynamic simulations show that when the rotors are close to the fuselage the competing forces from the ground effect and the reingestion lead to a nonlinear thrust relation with angular velocity for the rotors. In addition, there is a nonlinear download on the fuselage. All of these aerodynamic effects are nonlinear functions of the distance of the rotor from the fuselage. It does seem that there is an optimal placement where best performance is achieved, but further investigation is needed to fully specify such a configuration.
Experimental aerodynamic characterization of quadrotors
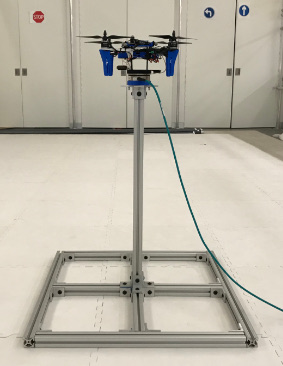
The experimental setup used for our characterization.
One of the objectives of the project is to develop low-order models that better capture the aerodynamic effects in the system due to its geometry, operating conditions, and presence of nearby surfaces. These models will be developed by a combined use of experimental data and detailed simulations. In this regard, we have developed an experimental platform for collecting and characterizing the relation between commands given to the rotors in an aerial vehicle (quadrotor), and the actual forces and torques generated. The setup involves an industrial-grade 6-D force-torque sensor, and a custom quadrotor platform (based on the PixHawk microcontroller).
Smart cage
Prototype of the 2-D version of the smart cage, which not only protects the quadrotor from impacts, but also acts as a touch sensor
One of the objectives of the project is to develop a suspended smart cage that not only protects the quadrotor, but also functions as a sensor during contacts (measuring forces and displacements).
We have currently completed a physical prototype of the smart cage (see picture on the right). In addition, he also developed related algorithms for obtaining the pose of the outer cage rim with respect to the body-fixed base (based on solutions of polynomial equations and iterative refinements), and the location of the vehicle in a known map (based on particle filtering) from the potentiometers embedded in the platform.
Liu, C. (2019). Localizing a Quadrotor With Collisions: Novel Sensor Design and Applications to Particle Filtering [Master’s Thesis]. Boston University. Download
Vang, B., & Tron, R. (2019). Geometric Attitude Control via Contraction on Manifolds with Automatic Gain Selection. IEEE Conference on Decision and Control.
Thai, A., Jain, R., & Grace, S. (2019). CFD Validation of Small Quadrotor Performance using CREATETM-AV Helios. VFS 75th Annual Forum & Technology Display. Download
Thai, A., & Grace, S. (2019). Prediction of small quadrotor blade induced noise. AIAA/CEAS Aeroacoustics Conference. Download
Thai, A., & Grace, S. (2019). A Numerical Study of Important Flow Effects for Quadrotor Performance in Hover. Northeast Regional AIAA Student Conference. Download
Start date: September 1, 2017
End date: August 31, 2022
Disclaimer: Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.

 This project is supported by the National Science Foundation grant “Control of Micro Aerial Vehicles under Aerodynamic and Physical Contact Interactions” (Award number 1728277).
This project is supported by the National Science Foundation grant “Control of Micro Aerial Vehicles under Aerodynamic and Physical Contact Interactions” (Award number 1728277).