Vision-based formation control
The goal of formation control is to move a group of agents in order to achieve and maintain a set of desired relative positions. This problem has a long history, and latest trends emphasize the use of vision-based solution. In this setting, the measurement of the relative direction (i.e., bearing) between two agents can be quite accurate, while the measurement of their distance is typically less reliable.
We propose a general solution which is based on pure bearing measurements, optionally augmented with the corresponding distances. As opposed to the state of the art, our control law does not require auxiliary distance measurements or estimators, it can be applied to leaderless or leader-based formations with arbitrary topologies. Our framework is based on distributed optimization, and it has global convergence guarantees.
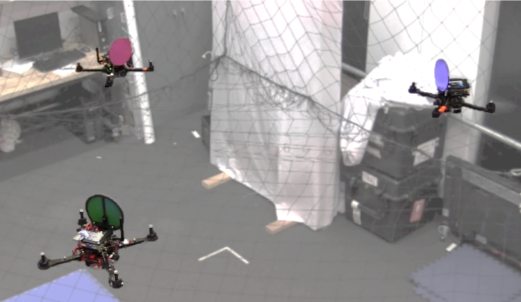
We have experimentally validated our approach on a platform of three quadrotors.