Digital movement phenotypes for precision rehabilitation
Among people with neurological injuries and diseases, different impairment patterns converge on a characteristically slow, asymmetric, and unstable gait. We seek to advance principles of precision medicine to the field of gait rehabilitation. This requires not only the development of targeted gait interventions, but also the advance of novel diagnostic methods that can efficiently match individual patients to those interventions. Before precision medicine is attainable in the field of gait rehabilitation, clinically-accessible classification methods that reflect patients’ underlying gait impairments are required. Indeed, the most common classification approach used post-stroke is based on walking speed, which is not indicative of underlying gait impairments.
Though clinic-based measurement devices such as the instrumented GaitRiteTM have allowed the few rehabilitation clinicians with access to these systems to objectively measure some gait quality measures — such as inter-limb asymmetry in the spatiotemporal determinants of walking speed — these measurements have had limited utility in guiding prescription and delivery of targeted therapies designed to act on specific gait deficits. More useful measurements of gait quality have historically been limited to motion laboratories, severely limiting the clinical translation of decades of biomechanical insights.
Inertial Measurement Units (IMUs) offer a promising solution for this measurement gap. IMUs can collect high-fidelity movement data continuously in the background of everyday walking activities and are already widely utilized to track step activity in both clinical practice and research. For this project, we are developing novel movement estimation algorithms using minimal IMU sets. Our goal is the advance of IMU-based classification of walking impairment based on both walking speed and gait quality. Because IMUs are inexpensive and can be used easily across both clinical and free-living settings, IMU-based locomotor phenotyping is highly scalable and has the potential to address the measurement gaps that have hindered progress in the field of gait rehabilitation.
Project Lead
-
Dheepak Arumukhom Revi, PhD
Robotic Controls Engineer, REEV
Postdoctoral Research Fellow (2025 – 2025)
PhD Student & Research Engineer (2020 – 2024)
Team
- Stefano De Rossi, PhD Visiting Scientist
- Lillian Ribeirinha-Braga Research Coordinator
-
Johanna Spangler, PT, DPT
Clinical Research Project Manager
Research Physical Therapist
Publications
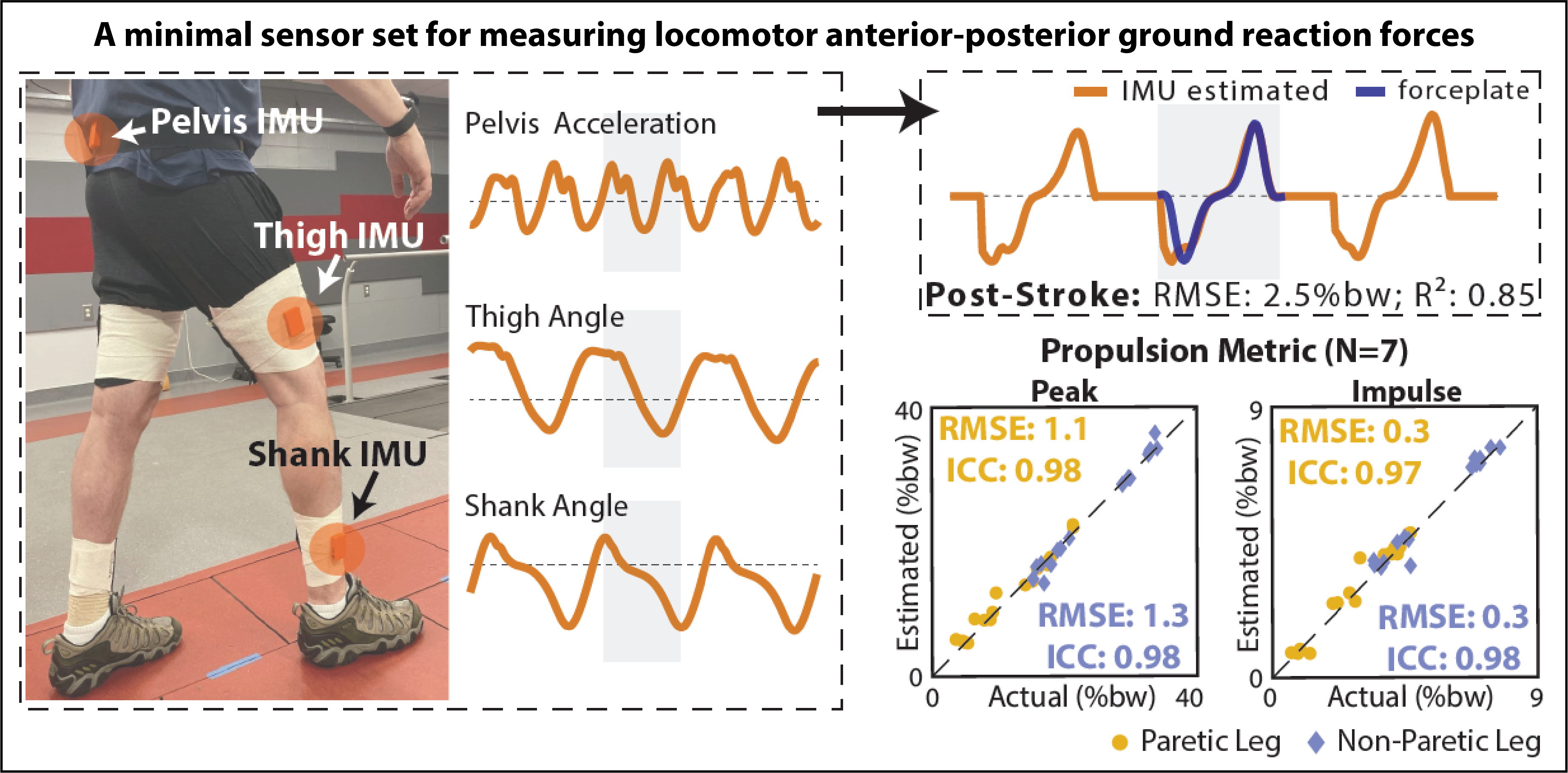
Indirect Measurement of Anterior-Posterior Ground Reaction Forces using a Minimal Set of Wearable Inertial Sensors: From Healthy to Hemiparetic Walking.
Journal of NeuroEngineering and Rehabilitation.
(see pdf or link)
Estimation of Walking Speed and its Spatiotemporal Determinants Using a Single Inertial Sensor Worn on the Thigh: From Healthy to Hemiparetic Walking.
Sensors.
(see pdf or link)