Distributed localization algorithms
Imagine a wireless camera network, where each camera has a piece of local information, e.g., the pose of the object from a specific viewpoint or the relative poses with respect to the neighboring cameras.
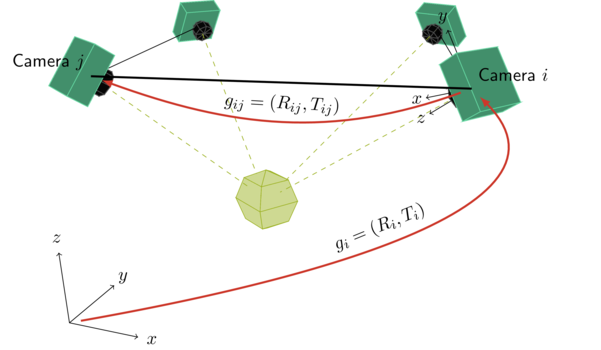
It is natural to look for distributed algorithms which merge all these local measurements into a single, globally consistent estimate. I derived such algorithms by formulating a global optimization problem over the space of poses, and shown their convergence from a large set of initial conditions using the aforementioned theoretical tools.