Multiagent Physical Cognition and Control Synthesis Against Cyber Attacks

The Challenge
Recent trends in industrial production automation indicate an ever-increasing adoption of autonomous mobile robots (approximately 1.3 millions), with systems emerging from both start-ups and well established companies. These robots, distributed across the factory floor, promise higher efficiency and lower burden on human labors. However, the interconnection and interaction of industrial robots with the physical world can open up new attack surfaces, with potential consequences ranging from production shutdown to human injuries. The recent emergence of cloud robotics platforms further expands the attack surface. Given the accelerating trend in large scale hacking events directed against high-profile companies which have resulted in serious data breaches, it is easy to imagine that similar incidents in the near feature could take advantage of the increasing automation to extend the attacks to the physical space.
Our Work
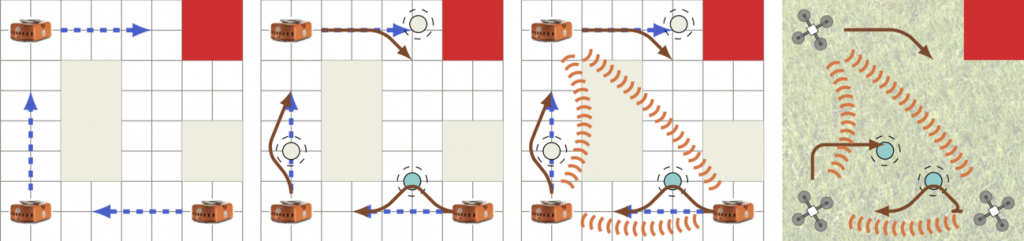
We propose a novel cyber-physical paradigm for enhancing the security in networks of advanced robots from external malicious cyber attacks (and internal non-malicious malfunctions as well). The core idea of the project is to design distributed security specifications based on introspection, where each agent is tasked in turn with the surveillance of the behaviors of other agents in the team in addition to the task- specific mission objective. We take advantage of the physical-sensing capabilities of these robots to craft a cyber-resilient network that can provide stronger guarantees on the detection of malicious attacks while minimizing the overhead in terms of system performance. We target two motivating applications: automated warehouses, and robotic swarm monitoring, with scenarios ranging from a structured setting (where high level planning is sufficient) to an unstructured one (where agents need to react to the environment and rely on collaboration).
Funding and support
![]() This project is supported by the National Science Foundation grant “CPS: Medium: Collaborative Research: Multiagent Physical Cognition and Control Synthesis Against Cyber Attacks
This project is supported by the National Science Foundation grant “CPS: Medium: Collaborative Research: Multiagent Physical Cognition and Control Synthesis Against Cyber Attacks
” (Award number 1932162).
Start date: September 1, 2019
End date: August 31, 2022
Disclaimer: Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.