Research
The Robomorphic Computing Laboratory is an interdisciplinary group that conducts research across domains, from computer architecture to robotics, and beyond.
Vision: Systematic Co-Design of Computing with the Real World
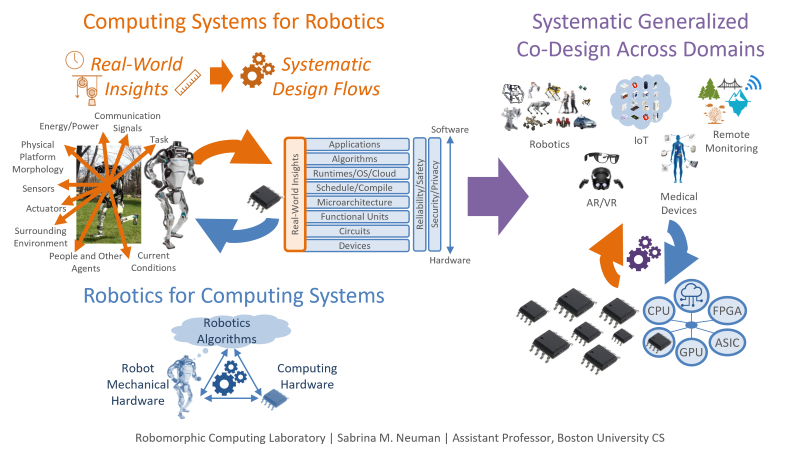
Real-World Knowledge → Systematic Design Flows
We methodically distill high-level physical real world information into the hardware-software computing stack, laying the foundation for a science of physically-aware computing co-design that spans across applications. Using real world information in the design process is a means to make systems robust and adaptable to ever-evolving algorithms and approaches.
Robotics: A Call to Action for Computing
Robotics has real physical properties that directly impact computational patterns, and it demonstrates the core challenges of computing system design for applications that physically interact with the world: (1) hard real-time constraints, (2) strict power budgets, (3) diverse deployment scenarios, and (4) a critical need for safety, security, and reliability in interaction with people and surroundings.
Goal: Help People
If robots can safely interact with people, we can have a positive impact on people’s everyday lives through applications such as elder care and assisted living.
Current Research
Active research areas include:
- Computing Systems for Robotics
- Designing novel computer hardware and systems for robotics applications
- Exploring the use of non-traditional computing technologies for robotics
- Robotics for Computing Systems
- Optimizing robotics algorithms to leverage performance and power advantages on computing platforms including CPUs, GPUs, FPGAs, and ASICs
- Co-designing robot mechanical structure alongside algorithms and computing hardware
- Co-Design Across Domains: Robotics and Beyond
- Building a generalized framework for robotics computing systems
- Extending systematic physically-aware computing design practices across domains (e.g., IoT sensing, medical/assistive devices, AR/VR, robotics)