Medical Devices
We aim at developing the next generation of medical devices and robots capable of providing advanced adaptation capabilities to unstructured and complex environments.
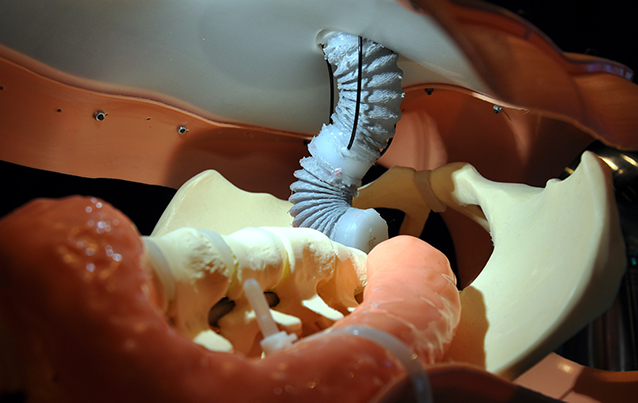
We are particularly interested in how robotics could change the way therapy is delivered, enabling for less invasive and more effective approaches to become viable. Our research focuses on designing instrumentation for minimally invasive surgery, we are interested in developing medical devices able to safely navigate the human anatomy and successfully perform surgical procedures in a minimally invasive way.
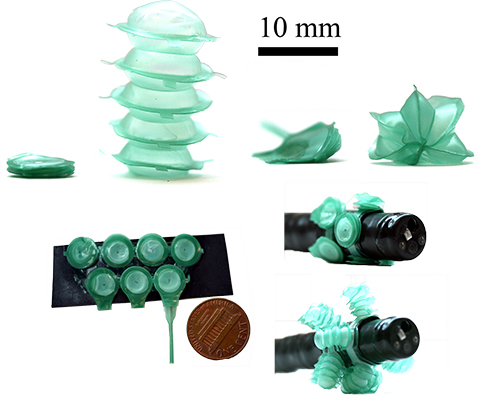
Current research projects mostly focus on the use of soft robotics for minimally invasive surgery across different scales, from centimeter-scale soft manipulators down to millimeter-scale soft microactuators.
We are also exploring deployable soft robots that can be used in conjunction with conventional medical instrumentation, such as endoscopes, to augment their therapeutic capabilities.
-
Soft Biomedical Robots
We are particularly interested in the potential of soft robotic technologies for designing medical tools able to safely interact and manipulate body structures.
Relevant Publications
- T. Ranzani, M. Cianchetti, G. Gerboni, I. De Falco, A. Menciassi. “A Soft Modular Manipulator for Minimally Invasive Surgery: Design and Characterization of a Single Module”, IEEE Transactions on Robotics 32(1), 2016. Video
- T. Ranzani, G. Gerboni, M. Cianchetti, A. Menciassi. “A bioinspired soft manipulator for minimally invasive surgery”, Bioinspiration & Biomimetics 10, 2015. Included in the “Highlights of 2015” collection. Video_1, Video_2
- M. Cianchetti*, T. Ranzani*, G. Gerboni, T. Nanayakkara, K. Althoefer, P. Dasgupta, A. Menciassi. “Soft robotics technologies to address shortcomings in today’s minimally invasive surgery: the STIFF-FLOP approach”, Soft Robotics. 1(2): 122-131, 2014. Featured article (*Shared first author)
- G. Gerboni, T. Ranzani, A. Diodato, G. Ciuti, M. Cianchetti, A. Menciassi. “Modular soft mechatronic manipulator for minimally invasive surgery (MIS): overall architecture and development of a full integrated soft module”, Meccanica. 50(11): 2865-2878, 2015
- T. Ranzani, S. Russo, C. J. Walsh, R. J. Wood. “A soft suction-based end effector for endoluminal tissue manipulation”, in Proc. of 6th Hamlyn Symposium on Medical Robotics, London, UK, June 2016
- M. Zimmermann, T. Ranzani, A. Menciassi, B. Kellner. “Development of a Cable Actuated Joint for a Surgical Robotic Flexible Arm”, Biomedical Engineering / Biomedizinische Technik. ISSN (Online) 1862-278X, ISSN (Print) 0013-5585, 2013
-
In-vivo/deployable devices
We are working on ways to manufacture soft devices that can be integrated into conventional medical instruments and be deployed at the surgical site to perform simple procedures.
Relevant publications
- S. Becker, T. Ranzani, S. Russo, R. J. Wood. “Pop-Up Tissue Retraction Mechanism for Endoscopic Surgery”, The 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). Video.
- T. Ranzani, S. Russo, F. Schwab, C. J. Walsh, R. J. Wood. “Deployable stabilization mechanisms for endoscopic procedures”, Proceedings of Robotics and Automation (ICRA), 2017 IEEE International Conference on. Video.
- J. Gafford, T. Ranzani, S. Russo, H. Aihara, R. J. Wood, C. J. Walsh, C. Thompson. “Snap-On Robotic Wrist Module for Enhanced Dexterity in Endoscopy”, Proceedings of Robotics and Automation (ICRA), 2016 IEEE International Conference on. 4398-4405, 2016. Video.
- J. Gafford, T. Ranzani, S. Russo, A. Degirmenci, S. Kesner, R. Howe, R. J. Wood, C. J. Walsh. “Towards Medical Devices with Integrated Mechanisms, Sensors and Actuators via Printed-Circuit MEMS”, Journal of Medical Devices. 11(1):011007-011007-12, 2017.
- T. Ranzani*, G. Ciuti*, G. Tortora, A. Arezzo, S. Arolfo, M. Morino, A. Menciassi. “A Novel Device for Measuring Forces in Endoluminal Procedures”, International Journal of Advanced Robotic Systems. 12:116, 2015. (*Shared first author)
Past Projects
G. Tortora, T. Ranzani, I. De Falco, P. Dario, A. Menciassi. “A Miniature Robot for Retraction Tasks under Vision Assistance in Minimally Invasive Surgery’‘, Robotics. 3(1): 70-82, 2014. Video.
M. Silvestri, T. Ranzani, A. Argiolas, M. Vatteroni, A. Menciassi. “A multi-point of view 3D camera system for minimally invasive surgery”, Sensors and Actuators A: Phys.. 202: 204-210, 2013
T. Ranzani, M. Silvestri, A. Argiolas, M. Vatteroni, A. Menciassi, “A novel trocar-less, multi-point of view, magnetic actuated laparoscope”, Proceedings of Robotics and Automation (ICRA), 2013 IEEE International Conference on. 1199-1204, 2013. Video.
Di Natali, T. Ranzani, M. Simi, A. Menciassi and P. Valdastri, “Trans-abdominal Active Magnetic Linkage for robotic surgery: Concept definition and model assessment”, Proceedings of Robotics and Automation (ICRA), 2012 IEEE International Conference on. 695-700, 2012
M. Salerno, T. Mazzocchi, T. Ranzani, F. Mulana, P. Dario, A. Menciassi. “Safety systems in magnetic driven wireless capsule endoscopy”, 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 3090-3095, 2013
G. Tortora, M. Salerno, T. Ranzani, S. Tognarelli, P. Dario, A. Menciassi. “A modular magnetic platform for natural orifice transluminal endoscopic surgery”, 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). 6265-6268, 2013