Teleoperation
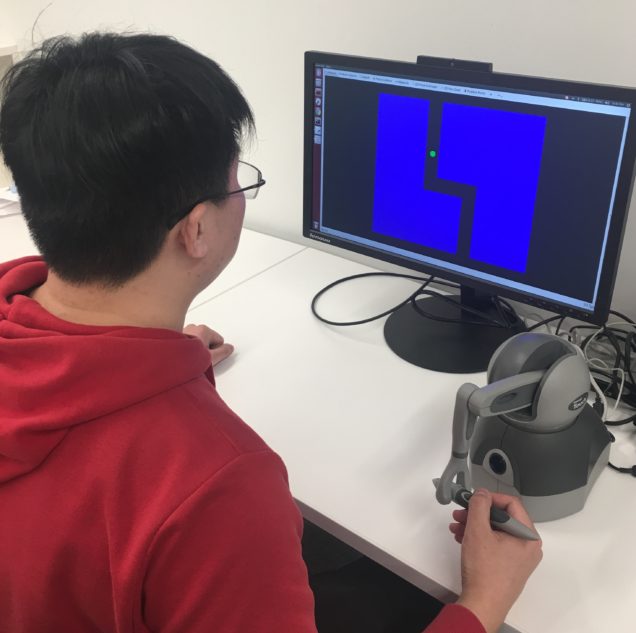
Teleoperation allows an operator to complete tasks that require human-level intelligence in environments where a human’s physical presence is not possible or is highly undesirable. For example, traditional open surgery requires a large incision through healthy tissue to let the surgeon see the operation site and manipulate it with his or her hands. A teleoperated minimally-invasive surgical system allows the surgeon to complete the same surgery with high dexterity through only three one-centimeter incisions. In another example, a search-and-rescue worker can teleoperate a robot to find and free survivors in the wake of a natural or man-made disaster, such as a high-magnitude earthquake, without being exposed to the disaster’s hazards.
The most successful teleoperators enable the operator to intuitively control the motion of the remote robot while enabling the operator to feel immersed in the remote environment. However, many of these systems are only suitable for applications in which it it safe for the operator to not maintain a high level of situational awareness of his or her local environment, which is often not the case. For example, a search-and-rescue worker controlling a robot in a disaster field would needs to maintain a very high level of awareness regarding his or her surroundings in order to stay safe disaster’s hazards.
Our work seeks to extend the range of applications for which an operator can easily control the remote robot, while fully understanding the robot’s environment, without sacrificing local situational awareness. We are motivated to improve teleoperation for search-and-rescue application. We are also seek to improve teleoperation systems that enable individuals who limited use of their arms and hands to better manipulate their environment.
Robotics For Manufacturing
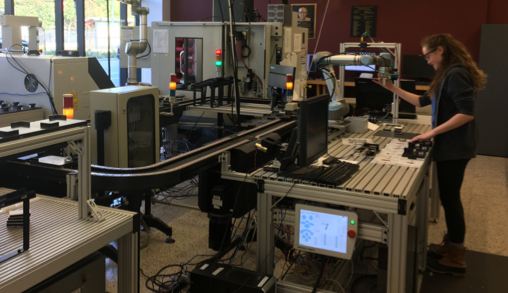
Human-safe collaborative robots have the potential to revolutionize manufacturing. Because the cost of these new robots is measured in tens of thousands of dollars, rather than hundreds of thousands or millions of dollars, production lines can realize a return on investment in months, rather than years. Furthermore, due to the small size of these robots, they can be incorporated directly into existing workstations, eliminating the need to shut down factory floors to add automation. Ease of implementation enables these robots to be used as general-purpose tools; for a relatively small up-front investment, manufacturers can flexibly automate different lines with the same robots. This enables automation to be incorporated in small-run production lines. Importantly, unlike their predecessors, the new industrial robots do not need to be separated from the human workers using safety fences. Therefore, rather than replacing human workers, robots are now being introduced on the factory floor to enhance productivity, while improving the human worker’s quality of work and work life, benefiting both the employee and the employer.
Although collaborative robots are already in factories, economists are not seeing the increase in economic growth expected if these robots were significantly increasing productivity. This is in part due to the fact that the potential for collaborative robots to fundamentally change manufacturing can be realized only after solving many human-robot interaction (HRI) challenges that arise when factory workers and robots are required to have intimate collaboration. For example, once programmed, robots execute pre-determined routines, rather than adapting to the human’s abilities and preferences, which will vary throughout a work day. Furthermore, the human can have a difficult time adapting to the robot’s actions because he or she cannot understand why the robot chooses its actions. A lack of mutual adaptation also hampers human-robot team resilience, as the team is less able to fluidly adapt to unexpected events online. Therefore, production cells must be temporarily closed until highly-trained technicians can address unforeseen problems. Limitations due to lack of team adaptability become more evident when one considers that production lines involve close coordination between teams comprised of multiple humans and robots. Furthermore, in small- run manufacturing, human-robot teams frequently change their tasks and should not lose productivity at the beginning of each new run.
Enabling mutual human-robot adaptation is a challenging research problem because it is difficult for a human and a robot to exchange information. Furthermore, after information has been exchanged, new algorithms need to be designed to enable the robot to act in an optimal manner. We are currently investigating the potential of haptics (touch-based technology) to facilitate communication between the human and the robot.
Assistive Robotics
Prosthetic and assistive robotics allow a human to better manipulate his or her local environment. Much like teleoperated robots, an assistive robot must understand the commands from a human operator, but now this individual may have physical and/or cognitive impairments. The assistive robot must also convey information about its state and the state of the environment back to the operator, even though the human and the robot are collocated. To motivate the necessity of feedback, imagine completing the simple manipulation task of picking up a coffee cup from a table, then imagine completing the intricate task of threading a needle. As with most daily tasks, your proprioceptive and haptic senses will enable you to easily pick up the coffee cup. Your visual sense is only lightly relied upon to complete this task. Your eyes will not focus on your hands and at most will only briefly focus on the mug, before returning their attention to your computer screen. In stark contrast, when threading a needle, your eyes must focus intently on your hands, the needle, and the thread to complete the task. Now imagine the profound fatigue that you would experience if every task required the same intense visual attention as threading a needle, which is the daily experience of upper-limb prosthetic users and a main impetus for my future lab’s work. Finally, the assistive or prosthetic robot must act to complete a task according to the state of the environment and the user’s inputs. Prosthetic and assistive robots may act with varying degrees of autonomy. However, the question of the appropriate degree of autonomy nuanced because the technology is heavily integrated into all areas of the operator’s life. The appropriate level of autonomy should be optimized for situation-specific operator preference.